


Je ne vais pas entrer dans les méandres de la législation pour les drones, mais pour faire simple, tout drone de plus de 800g devra être équipé au 31 décembre 2020 d’un dispositif de signalement électronique. Si vous possédez comme moi un appareil ne pouvant se conformer à la législation par une simple mise à jour du firmware, vous devez passer par l’option du dispositif externe !
Et là plusieurs solutions existent, payantes bien entendu, et relativement onéreuses au rapport de la taille du dispositif…
Bref c’est le moment de se pencher sur les version DIY et là le site Hélicomicro nous propose une solution avec cet article :
Sauf que même si c’est très bien expliqué, ça peut être un peu complexe a faire soit même, j’ai donc décidé d’en faire une tutoriel simplifié qui a fonctionné pour moi
Ce dont vous aurez besoin :
- Un module TTGO T-Beam
https://www.amazon.fr/gp/product/B07SFVQ3Z8/ref=ppx_yo_dt_b_asin_title_o08_s00 - Une batterie 18650 pour alimenter le module
- Le code disponible sur cette page : https://www.airbot-systems.com/free-downloads/
- le logiciel Platformio disponible sur https://platformio.org/platformio-ide
- Visual Studio Code (https://code.visualstudio.com/)
- Git (Platformio me l’a demandé, ne me demandez pas trop à quoi ça sert…) qui est lui dispo ici : https://git-scm.com/download/win
Toutes les informations sont disponibles je le rappelle sur l’excellent site Helicomicro (non aucun action chez eux, mais ils sont très bon dans leur domaine)
On installe ce dont on a besoin pour travailler
N’étant pas du tout habitué à la plateforme VsCode ou plateformio, j’ai suivi les instructions de Claude Emery :
- Installer Visual Studio
- Une fois installé vous lancez l’application et vous cliquez sur l’icône extensions [CTRL+Shift+X]
cherchez directement dans le moteur de recherche « platformio », installez l’extension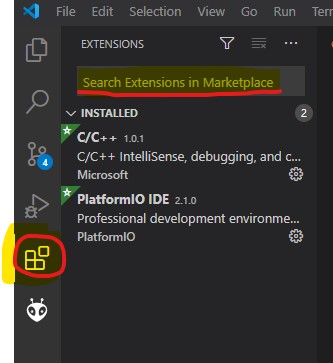
- Dézippez l’archive que vous avez téléchargé en B (full_package_DroneID_FR.zip), je vous conseille de vous créer un dossier spécifique ou vous voulez, perso j’ai mis ça dans mes documents dans un sous-dossier « drone » pour m’y retrouver plus facilement.
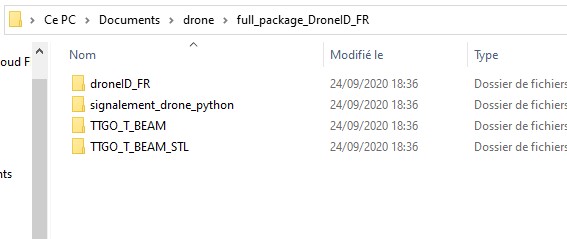
Dans ce dossier on va retrouver 4 sous dossiers, celui qui va nous intéresser ici se nomme « TTGO_T_BEAM »
Il existe certainement d’autres méthodes, pour ouvrir le dossier qui nous intéresse mais j’ai simplement utilisé le menu « open folder » de VSCode 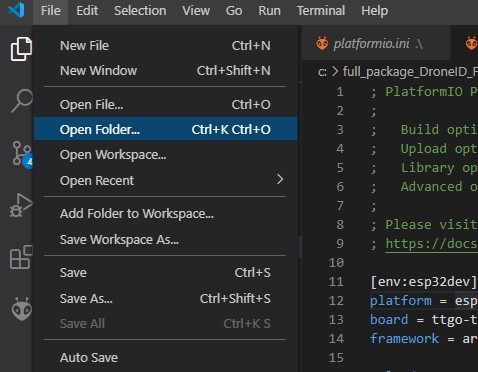
recherchez le dossier « TTGO_T_BEAM »
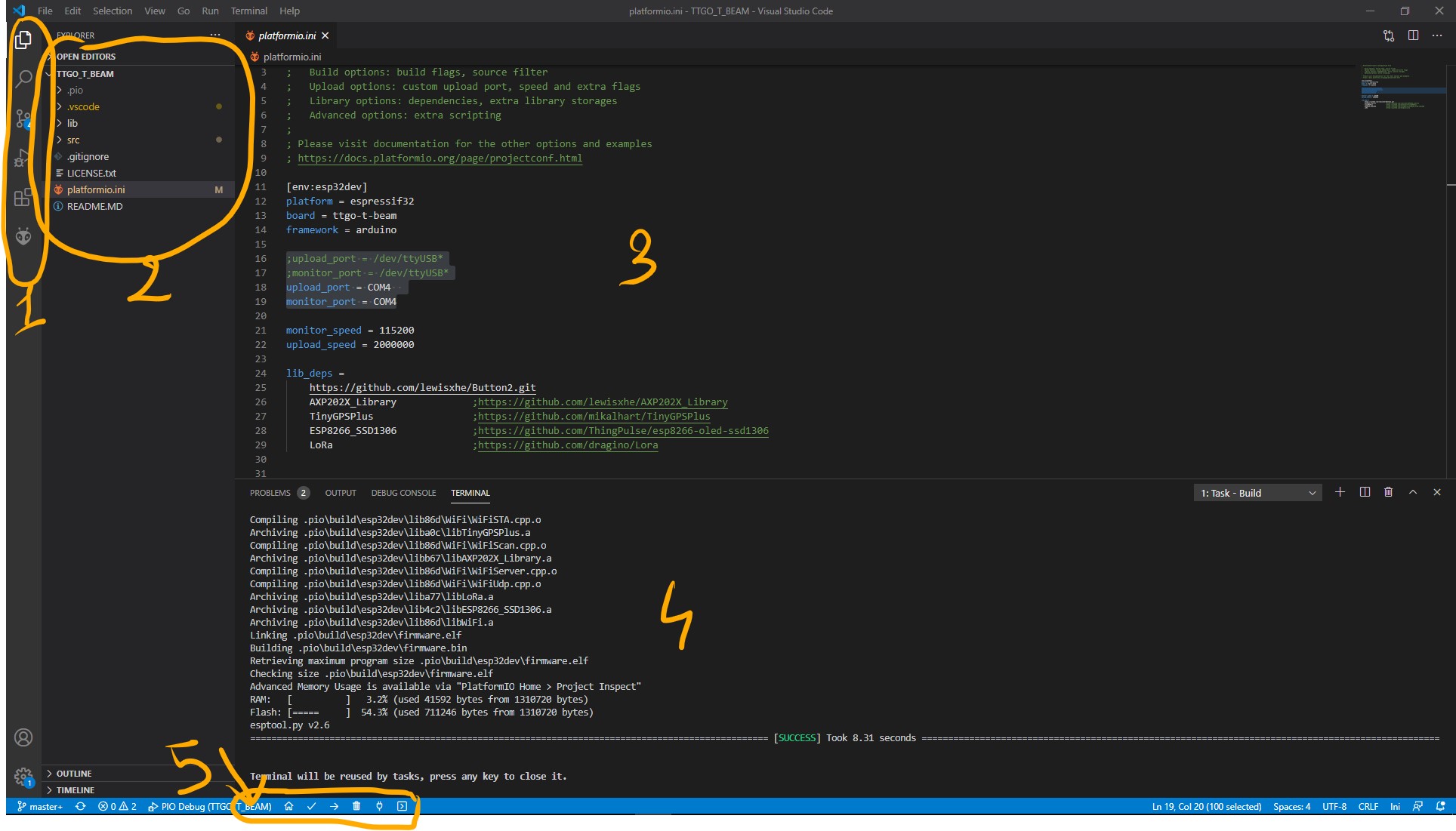
L’interface se divise en 5 parties :
- la barre d’activité regroupant l’explorateur de fichiers, la recherche, les outils de contrôle et débogage,
- vos fichiers avec leur arborescence,
- le contenu du fichier sélectionné en 2
- la fenêtre du terminal,
- la barre des outils de compilation, d’envoi, de nettoyage et la fenêtre de moniteur.
A ce stade vous avez l’environnement qui doit être prêt, mais il faut modifier quelques valeurs dans certains fichiers. Ceux-ci sont regroupés sans le dossier « SRC »
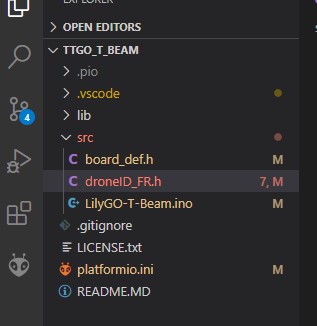
Dans l’explorateur (2) sélectionnez le fichier « droneID_FR.h »
En ligne 35 modifiez la valeur « ILLEGAL_DRONE_APPELEZ_POLICE17 » par ce que vous voulez, moi j’y ai mis mon identifiant drone Alphatango du type « ABC-FR-12345 »
Ouvrez le fichier « LilyGo-T-Beam.ino »
En ligne 45 modifiez « ILLEGAL_DRONE_AP » par ce que vous voulez, j’ai mis « drone » + mon numéro d’enregistrement DGAC du type « ED0000 » = « drone_ED0000 »
Edit du 04/11/2020, au vu des dernières dispositions de la loi « drone » et de se future mise en application en même temps que celle Européenne, il y a un gros questionnement concernant une identification Française + Européenne…
A défaut d’installer 2 émetteurs et dans l’attente des textes définitifs j’ai opté pour mettre ce fameux code d’exploitant d’UAS (disponible dans votre interface Alphatango) sous la forme FRAxxxxxxxxxx en remplacement de « drone_ED…. ».
Edit du 31/12/2020, dans Alphatango il existe désormais un « numéro d’identification électronique » a utiliser dans la ligne 35 (Merci Nash)

En ligne 52 il faut également modifier la valeur Drone_id[]…
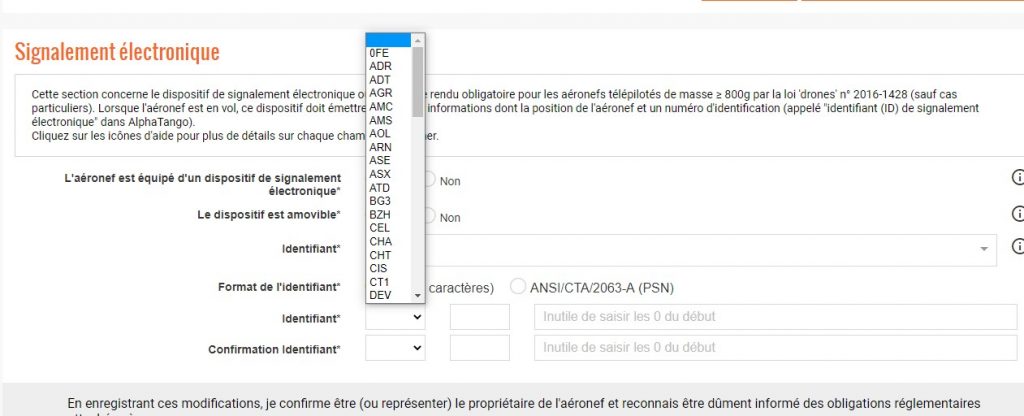
Obtenir le code d’identification
Là ça se complique un peu car cet ID va vous être fourni par le site Alphatango et se présente tous la forme d’une code de 30 caractères codant votre Trigramme, un code de « modèle » et un numéro de série.
Attention, ce trigramme doit être officialisé par la DGAC et demandé via le formulaire CERFA 15960*01
Je vous laisse remplir la partie administrative, en proposition d’identifiants vous pouvez proposer 3 trigramme, je vous donne le miens par exemple (qui ne peut donc plus être utilisé par personne d’autre) : DJP (comme Drone Jerome Pouille), libre à vous d’imaginer n’importe quoi pourvu qu’il y se compose de 3 caractères.
Vous envoyez ce document à l’adresse indiquée en bas de la page (dsac-nav-drones-bf@aviation-civile.gouv.fr) et vous n’avez plus qu’à attendre leur retour et le document d’attribution de trigramme. Il se peut qu’ils vous demandent quelques informations sur votre dispositif en complément, dans mon détail j’ai rajouté un lien vers la page de Hélicomicro en haut de page pour leur détailler le dispositif.
Modif n°(je sais plus) : depuis mi janvier certains ont reçu une nouvelle instruction de la DGAC concernant le Trigramme,
https://www.helicomicro.com/2021/01/21/signalement-electronique-a-distance-le-trigramme-000-pour-les-balises-diy
désormais les dispositifs DIY doivent utiliser le code « 000 »
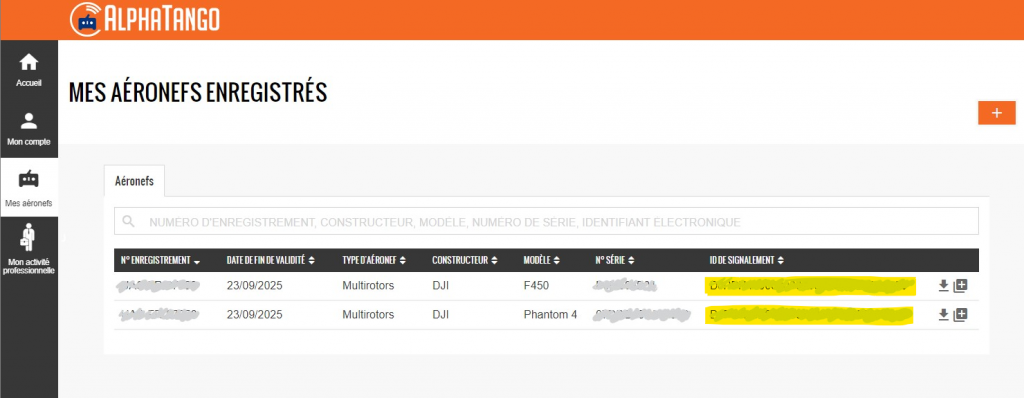
Direction Alphatango

Une fois votre trigramme attribué vous allez sur Alphatango, dans l’onglet « mes aéronef » vous allez retrouver l’ensemble de vos aéronefs, cliquez sur celui que vous voulez (l’identifiant peut être commun à plusieurs aéronef à condition de ne n’utiliser qu’un seul dispositif) et allez dans la partie « Signalement électronique » puis « editer »
validez comme suit :
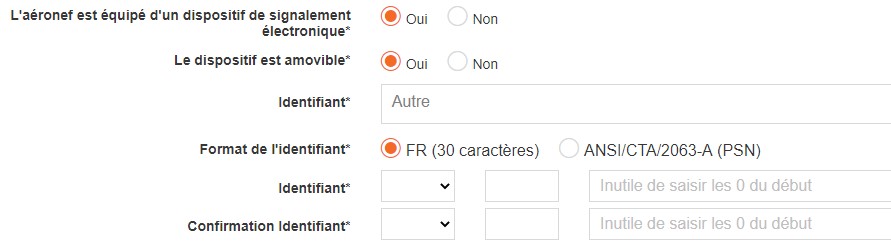
L’identifiant est une liste de choix ou vous retrouverez VOTRE trigramme, attention de bien prendre celui qui vous a été attribué et pas un autre sous peine de sanction en cas de contrôle !
Dans la deuxième case vous avez 3 caractères a mettre comme « modèle »
Enfin dans la troisième case un numéro de série, j’y ai mis le numéro de série de mon phantom 4, sans le 0 du début.
Une fois validé le site vous redirige vers la page de votre aéronef, avec cette fois-ci un identifiant complet de 30 caractères. C’est ce code qui est a copier
Retour dans le fichier « LilyGo-T-Beam.ino » à la ligne 52, vous remplacez « ILLEGAL_DRONE_APPELEZ_POLICE17 » par votre identifiant à 30 caractères.
Dernier fichier à modifier : « board_def.h », le fichier de configuration de la carte.
Sur votre carte TTGO sera indiqué une version à côté de la prise antenne, (moi j’ai la V1.1)

J’ai donc modifié comme suit le fichier board_def.h (// Désactivant le code de la ligne) :
//#define T_BEAM_V07
#define T_BEAM_V10
A ce point de l’opération vous devez avoir tout paramétré pour lancer la compilation du code.
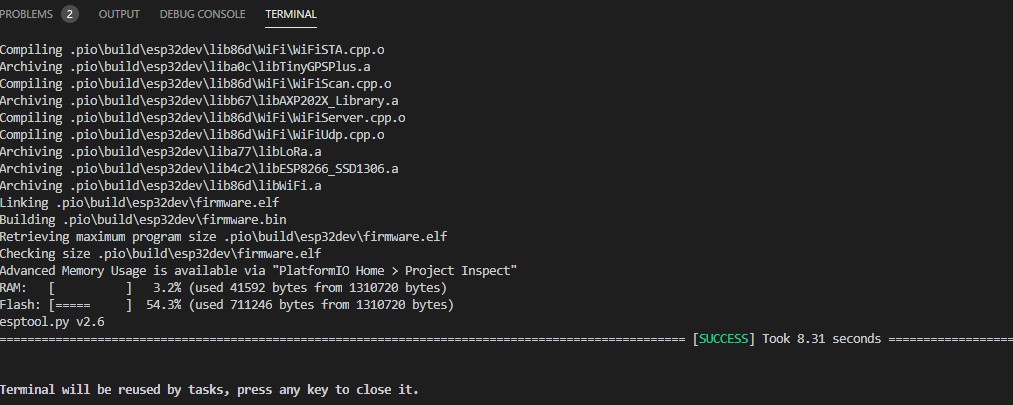
Pour compiler le code vous cliquez sur ![]() en bas de l’écran de Vscode. Si tout se passe bien vous devriez avoir dans le terminal un résultat similaire à ceci
en bas de l’écran de Vscode. Si tout se passe bien vous devriez avoir dans le terminal un résultat similaire à ceci
S’il vous indique un message d’erreur du style « Git » manquant, c’est que vous n’avez pas installé tous les logiciels requis en début de processus (pensez à redémarrer votre ordinateur)
Uploader le code vers la carte
A l’usage je me suis rendu compte qu’il fallait aussi vérifier dans le fichier « platformio.ini » la configuration du port pour uploader le code vers la carte sous peine d’avoir un message d’erreur au moment de l’ouverture du port.
Encore faut-il trouver le bon port !
Pour ça j’ai trouvé un code qui scanne les ports disponible
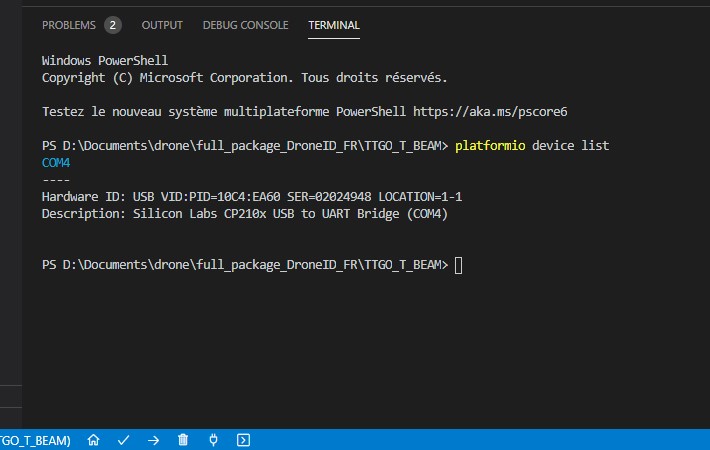
Cliquez sur ![]() dans la barre du bas puis entrez « platformio device list »
dans la barre du bas puis entrez « platformio device list »
Vous allez avoir un résultat comme la capture ci-dessous (pensez à supprimer les autres connecteurs USB comme une liaison à un ordinateur de plongée par exemple sinon vous allez avoir plusieurs ports…), moi j’ai « COM4 »
Dans le fichier « Platformio.ini » j’ai donc changé les lignes suivantes
;upload_port = /dev/ttyUSB*
;monitor_port = /dev/ttyUSB*
upload_port = COM4
monitor_port = COM4
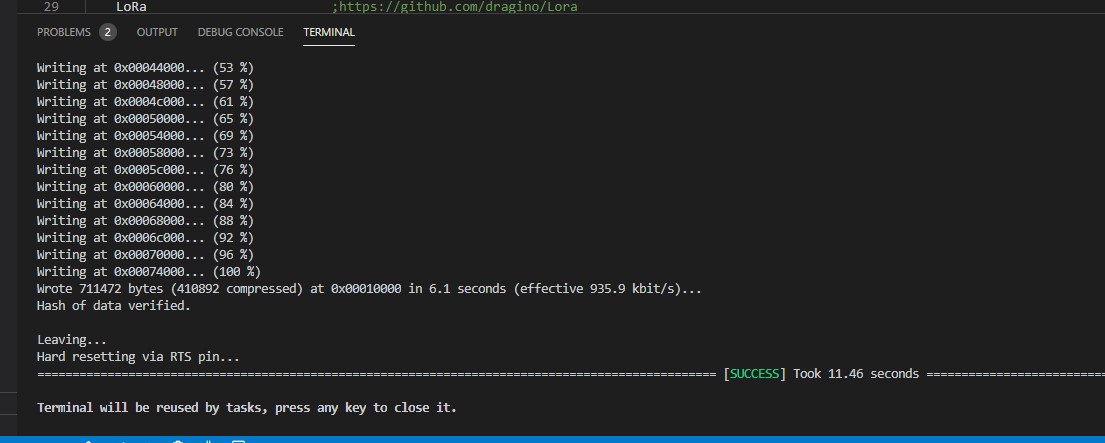
Donc maintenant on a théoriquement terminé, reste à uploader vers la carte le code compilé, ce qui se fait à l’aide de l’icône ![]() tout simplement !
tout simplement !
Après un petit temps d’upload vous devriez avoir l’information « [SUCCESS] took xx.xx seconds »
Et c’est terminé !
Pour vérifier scannez le wifi avec votre téléphone ou votre ordinateur, vous trouverez un nouveau réseau du nom que vous avez indiqué.
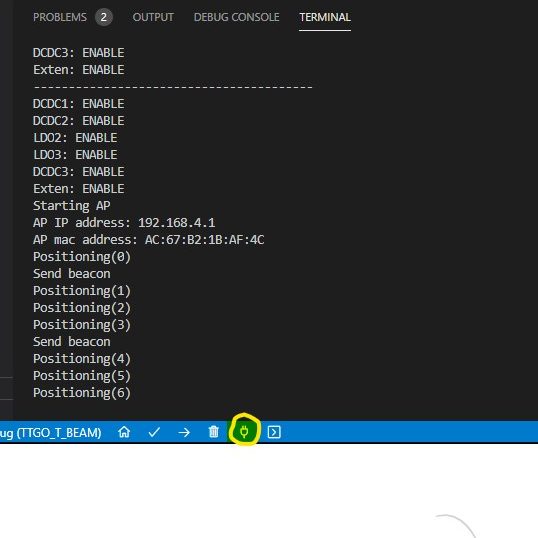
Vous pouvez également vérifier que le code de la carte fonctionne en utilisant le « serial monitor ».
J’étais à l’intérieur au moment de faire la capture, le GPS n’a donc pas été en mesure de s’initialiser correctement, mais en extérieur ça fonctionne !
En espérant que ce petit tutoriel vous permette de concevoir votre dispositif d’identification autonome, j’ai seulement tenté de compiler les informations que j’ai glané sur internet pour y arriver. N’étant pas un habitué de cette carte et de sa programmation je ne pourrais trop vous dépanner en cas de soucis, mais vu que j’ai réussi en utilisant strictement la méthode ci-dessus, vous devriez y arriver sans trop de soucis, en tout cas n’hésitez pas si besoin.
Boitier pour Phantom 4
J’ai conçu un boitier pour mon Phantom 4, il est disponible sur Thingverse : https://www.thingiverse.com/thing:4646373
Rassurez-vous j’ai mis en ligne une version normale sans la gravure de mon code UAS comme sur ma photo.







Bon tuto, je l’ai suivi sans soucis. Habitué à l’IDE Arduino j’ai découvert Visual Studio Code qui est pas mal du tout.
Le Transpondeur est opérationnel, sauf que j’ai grillé la LED bleu en faisant un court circuit avec une batterie 18650.
Cette batterie est trop lourde, je vais la remplacer par une petite batterie 1S pour ramener le poid à 50 gr.
Merci pour ce tuto 🙂
J’ai trouvé une batterie assez légère, le dispositif complet fait 88g avec le boitier imprimé en 3D pour le Phantom 4.
Mais en effet j’ai également réfléchi a changer la 18650 pour une petite Lipo, il faut par contre insérer un dispositif empêchant la lipo de se vider totalement, autrement elle peut s’endommager…
mais il y a moyen de gagner et en poids et en taille je pense…
J’ai commandé ces batteries pour remplacer la 18650 :
https://fr.aliexpress.com/item/32823647449.html
Ça devrait faire l’affaire, avec une autonomie correcte.
Merci pour ces explications. Je n’attends plus que le module pour effectuer l’opération.
Concernant la batterie, j’ai pas déjà pas mal de 18650 (vapote), mais également plusieurs lipo pour le drone X5HW de mon fils (qui va bientôt avoir un nouveau drone bien plus performant et équipé d’une balise 😉
Quel dispositif conviendrait pour limiter la décharge de la lipo ?
il faut ce type de circuit : https://www.amazon.fr/MissBirdler-Protection-Batterie-M%C3%A9moire-Arduino/dp/B07DHQZT8K
en gros ça empêche de surcharger la batterie à la charge et à la décharge en dessous de 3v-2.9v ça coupe également, pour protéger la Lipo.
Il en existe pour des 1S, 2S…
souvent tu peux en trouver sur certaines Lipo et/ou sur les 18650 (c’est l’espèce de pastille qui apparait à une des extrémité)
Bonjour,
Merci beaucoup pour ce tuto explicite et du temps que vous avez donné pour nous faciliter la mise en conformité de nos drones.
J’ai fait toute la procédure et réussi la compilation.
Je bute sur l’introduction des données dans la carte.
J’ai ce message à la fin et je n’arrive pas à comprendre ou ça cloche :
Configuring upload protocol…
AVAILABLE: esp-prog, espota, esptool, iot-bus-jtag, jlink, minimodule, olimex-arm-usb-ocd, olimex-arm-usb-ocd-h, olimex-arm-usb-tiny-h, olimex-jtag-tiny, tumpa
CURRENT: upload_protocol = esptool
Looking for upload port…
Use manually specified: COM1
Uploading .pio\build\esp32dev\firmware.bin
esptool.py v2.6
Serial port COM1
Connecting…….._____….._____….._____….._____….._____….._____….._____
A fatal error occurred: Failed to connect to ESP32: Timed out waiting for packet header
*** [upload] Error 2
================== [FAILED] Took 28.29 seconds ========================================================================The terminal process « C:\Users\Utilisateur\.platformio\penv\Scripts\pio.exe ‘run’, ‘–target’, ‘upload' » terminated with exit code: 1.
Terminal will be reused by tasks, press any key to close it.
Ma carte est une TTGO T BEAN 868/915Mhz LORA32 – T22_V1.1
Merci de votre aide si vous le pouvez, cela fait 2 journée que j’essai de trouver des tutos, de modifier les fichiers, les com …
Patrick
Bonjour Patrick,
Je ne suis pas un expert dans cette carte, mais il semble que le problème se situe sur le port de communication : « Failed to connect to ESP32: » sur le COM1
Je vous conseille de déconnecter tout ce qui peut être connecté à l’ordinateur hors clavier et souris, j’ai eu mon ordinateur de plongée qui était connecté en USB et ça a posé un soucis d’envoi…
Déconnectez le maximum et refaites la commande suivante dans le terminal : platformio device list
et regardez sur quel port se situe votre carte (sur mon tutoriel la mienne est en COM4), il a trouvé ue carte « silicon labs cp210x USB to UART Bridge (com4)
Il faut ensuite faire un changement dans le fichier « Platformio ».
En espérant que cela fonctionne…
Bonsoir Jeje,
Merci pour votre retour
J’ai testé avec vos recommandations, cela a échoué.
le platformio device liste donne cela :
PS F:\Documents\DRONE\Identification systeme\full_package_DroneID_FR\TTGO_T_BEAM> platformio device list
COM1
—-
Hardware ID: ACPI\PNP0501\0
Description: Port de communication (COM1)
———————
Je n’ai pas l’impression qu’il reconnaisse la carte.
La carte doit elle être sous tension (allumé) ?
Le voyant bleu doit il être fixe ou clignotant ? je ne suis pas arrivé à trouver une notice de la carte en français.
avec tous mes remerciements
mon fichier ini :
[env:esp32dev]
platform = espressif32
board = ttgo-t-beam
; bord = ttgo-lora32-v1 ****j’ai testé cela mais qui ne fonctionne pas
framework = arduino
; upload_port = /dev/ttyUSB*
; monitor_port = /dev/ttyUSB*
upload_port = COM1
monitor_port = COM1
monitor_speed = 115200
upload_speed = 2000000
lib_deps =
https://github.com/lewisxhe/Button2.git
AXP202X_Library ;https://github.com/lewisxhe/AXP202X_Library
TinyGPSPlus ;https://github.com/mikalhart/TinyGPSPlus
ESP8266_SSD1306 ;https://github.com/ThingPulse/esp8266-oled-ssd1306
LoRa ;https://github.com/dragino/Lora
Jeje
J’ai enfin trouvé !
La carte n’était pas reconnu par mon ordinateur car il fallait intaller le driver de la carte.
Donc j’ai installé par ce lien le driver : https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers
Et enfin la carte reconnu en com4
Content d’avoir travaillé pour la communauté (un petit peu)
Et merci pour votre aide et tout ce travail
Bon week end 🙂
Patrick
ah…. en effet étrange, je n’ai pas eu besoin d’installer quoi que ce soit pour ma carte de mon coté !
L’essentiel est que ça fonctionne 🙂
merci de l’info, ca risque d’aider d’autres personnes !
Merci !
J’ai eu le même problème sur Mac.
Une fois l’extension installée, ça roule 🙂
/dev/cu.SLAB_USBtoUART
———————-
Hardware ID: USB VID:PID=10C4:EA60 SER=0213449F LOCATION=20-1
Description: CP2104 USB to UART Bridge Controller
Un immense merci, grâce à toi j’y suis parvenu.
Mike
Merci,
J’avais quasiment réussis mais la carte n’envoyait que mon indicatif wifi Alphatango mais en test, il n’y avait que Beacon.
Grace à cette modif que vous avez indiquer :
//#define T_BEAM_V07
#define T_BEAM_V10
Maintenant j’ai lat et long. Bref impec
.
Pour mon identifiant électronique demandé par cerfa, j’ai eu le trigramme demandé mais juste ces 3 lettres et rien d’autre est-ce normal ? j’ai le courrier de DGAC le confirmant.
Merci encore
Bonjour Stéphane, oui ce fameux trigramme c’est simplement l’attribution de ces 3 lettres !!!
tout ça pour ça en fait 😀
j’ai été assez surpris en pensant qu’il fallait y mettre un code complet en plus, mais non…
Tant mieux si j’ai pu être utile 🙂
Bonjour Stefan , pourrais tu m’aider à remplir la déclaration cerfa stp concernant l’obtention tu trigramme.
merci beaucoup
Bonjour, Merci pour ce tuto très bien fait !! tout a fonctionné du 1er coup ! et c’était loin d’être gagné vu mes compétences infos !
Bravo !!
Moi je but sur un problème, je vois pas comment il faut faire sa m’indique le message suivant : Looking for upload port…
Error: Please specify `upload_port` for environment or use global `–upload-port` option.
For some development platforms it can be a USB flash drive (i.e. /media//)
*** [upload] Explicit exit, status 1
Bonjour,
Je ne suis pas un expert dans cette carte et je ne peux que vous donner le même conseille que plus bas dans les commentaires concernant le port de communication 🙁
D’autres ont eu a installer un driver également, moi non…
« Je vous conseille de déconnecter tout ce qui peut être connecté à l’ordinateur hors clavier et souris, j’ai eu mon ordinateur de plongée qui était connecté en USB et ça a posé un soucis d’envoi…
Déconnectez le maximum et refaites la commande suivante dans le terminal : platformio device list
et regardez sur quel port se situe votre carte (sur mon tutoriel la mienne est en COM4), il a trouvé ue carte « silicon labs cp210x USB to UART Bridge (com4)
Il faut ensuite faire un changement dans le fichier « Platformio ». »
En espérant que cela fonctionne…
Super tutos merci !
Je viens de commander la carte et de remplir le CERFA… j’espère que grâce à toi je vais pouvoir continuer de faire voler mon bon vieux Phantom 3 !
Joyeuses fêtes !
Juste une question toute bête…
En france, le 433 mhz est autorisé mais je ne crois pas que les autres fréquences le soient…
A moins que le dispositif n’active pas la partie 865 mhz.
Petit update pour le paramétrage du SSID, sur le site Alphatango, dans l’onglet Exploitant d’UAS la ligne suivante apparaît :
Code à entrer dans le dispositif d’identification à distance.
Ce code correspond au numéro d’enregistrement avec -uag en plus à fin.
Merci Nash, je viens de corriger 🙂
par contre je n’ai pas de -uag à la fin, tu as eu une information la dessus ?
Non, je n’ai aucun idée de ce code -uag 🙁
Bonjour JeJe62, merci pour ce tuto! Concernant le code évoqué par Nash, il y a effectivement dans le code à entrer un tiret « – » et 3 lettres à ajouter pour l’identification de notre n° d’exploitant, pour ma part c’est « nwf ».
@JeJe : concernant le boitier, vous l’avez imprimé vous même? Y-a-t-il moyen de modifier le fichier pour en faire un boitier sans le système d’accrochage propre au Phantom, j’ai un Zino donc je voudrais le coller sur le dos?
Pour l’alimentation, l’utilisation d’une LiPo 1s fait gagner au moins 30 g, c’est une bonne idée!
ok, donc en fait pour ma part c’est « -780 », des chiffres donc, je pensais à des lettres d’où mon interrogation 🙂
merci à vous deux !
pour le boitier il y a celui d’origine dans le Zip contenant le code normalement (https://www.airbot-systems.com/free-downloads/)
c’est le boitier qu’on vois sur la vignette.
Pour la lipo j’y ai pensé mais j’ai pu trouver sur Amazon des 18650 ultralégères du même poids qu’une Lipo plate quasiment, je n’ai don cpas cherché à modifier ensuite.
Modèle Ultrafire CN 18650 9800mAh jaune
Merci les infos complémentaires sur le boitier. J’ai regardé la pile, le poids indiqué est d’environ 50g sur différents sites, mes lipos font 12 g…mais la puissance est 10 fois plus faible, cependant avec des temps de vol de 30 mn ça doit suffire.
Bonjour ,
Merci pour ce tuto !
Une idée de comment verifier en wifi le signal émis par la balise ( outre le SSID ) . ?
Merci
Bonjour,
pardon d’avoir tardé à répondre, j’ai testé de mon coté car je n’avais pas su le faire pour l’instant.
la solution la plus « simple » que j’ai trouvé est de passer par Linux et le script python de la gendarmerie nationale : https://github.com/GendarmerieNationale/ReceptionInfoDrone
Après simple…. c’est relatif car j’ai bien galéré avec mon Raspberry Pi 4 mais j’y suis arrivé et le signal renvoyé par ma carte est ok !
Bonjour, tout d’abord bonne et heureuse année.
Aussi, merci pour le temps accordé à ce tuto, clair et facile à suivre.
Il me reste toute fois quelques interrogations mais la principale est : pourquoi je n’arrive pas à charger le programme dans la carte ?
J’ai ce message d’erreur :
looking for uplaod port…
Error: please specify « up load port » for environnement or use global « –uploadport » option
for some development platforms it can be a USB flash drive (i.e. /media//)
*** [upload] explicit exit, status 1
the terminal process « C:\Users\hp\.platformio\penv\Scripts\pio.exe ‘run’, ‘–target’, ‘upload' » terminated xith exit code: 1
J’ai pourtant installé les drivers de la carte car elle n’était pas reconnue à la 1ère connection, mais là je bloque.
Merci d’avance pour votre aide.
Bonjour JeJe,
Petite question sur le boitier : quelle est grossièrement sa longueur ?
Merci aussi pour le fichier Zip pour configurer son impression en 3D ; les domensiond sont-elles en mm ou en cm ?
bonjour, en voilà les cotes précises 🙂

Bonjour, je vous renvoie ce message car j’ai trouvé d’où venait mon problème. A la dernière étape dans le fichier platformio.ini je n’avais pas enlevé le « ; » donc cela me faisait une erreur.
Serait-il possible que l’on se contacte par téléphone car je souhaiterai réaliser une vidéo tuto en relation directe avec votre article.
Cordialement.
Bonjour Stéphan, oui, il faut bien veiller a enlever le « ; » car ce code en début de ligne indique que cette ligne ne sera pas lue.
Pas de soucis pour qu’on se contacte, je n’ai aps eu le temps de vous rappeler pour l’instant, mais n’hésitez pas à me relancer 🙂
Bonjour et bonne année à tous,
Puis je avoir de l’aide pour remplir le document CERFA afin d’obtenir mon trigramme svp.
je ne sais pas quoi renseigner .
tous mes drones sont des dgi Phantom 2 et 3.
Merci beaucoup !
bonjour, une aide à quel niveau exactement ?
Je vous invite a lire également le commentaire de HsG qui indique » j’ai reçu ce jour une réponse de la DGAC suite à ma demande d’attribution, s’agissant « d’un modèle en kit construit à titre privé », le trigramme « constructeur » est imposé, c’est « 000 » »
Bonjour, j’ai encore une petite question sur le fichier de paramétrage du boitier. A quoi servent les petits « boutons » ?
Bonjour,
Avec la carte façe à vous, de gauche à droite :
Bouton de gauche : On/Off (2secondes pour ON, au moins 7-8s pour OFF)
bouton central : je ne sais pas trop
Bouton de droite : Reset
bonjour à tous, du nouveau pour le Trigramme, j’ai reçu ce jour une réponse de la DGAC suite à ma demande d’attribution, s’agissant « d’un modèle en kit construit à titre privé », le trigramme « constructeur » est imposé, c’est « 000 », le code modèle est de 3 lettres puis le code correspondant au n° de série de la balise sera de 24 chiffres comme l’a déjà expliqué JEJE plus haut. Le courrier est daté du 15/01, c’est donc tout frais. Donc plus besoin de faire de demande pour les particuliers bricoleurs…
Merci de l’info !
Ils ont du se rendre compte qu’attribuer un trigramme à tous ceux qui font du DIY devenait impossible 😀 😀
Bonjour,
Hier le 19/01 , j’ai recu le courrier de la DGAC m’informant pour le trigramme.. en effet je confirme il faut Utiliser le 000 quand on construit sois même son dispositif.
Merci.
Rebonjour..
maintenant qu’ils ont simplifié la chose pour l’obtention du trigramme concernant les dispositifs DIY, pouvez vous m’aider sur un autre point s’il vous plait.
Cela concerne la deuxième case , ayant un Phantom 3 advanced .. que puis je mettre comme modèle à cet emplacement.
On peut y inscrire que 3 caractères !! P3A ? DGI? PH3??
Merci
Vous pouvez-y mettre ce que vous voulez en fait, moi j’ai mis « PH4 » pour mon phantom 4, je pourrais mettre « F45″ pour mon F450, le tout est de déterminer ensuite un numéro de série derrière qui vous sera propre (basé sur le numéro de série du drone par exemple ». L’ensemble du numéro d’identification devant faire 30 caractères maxi.
Bonjour à tous, merci pour ce tuto très explicite. Je vois sur mon téléphone le nouveau réseau wifi mais ça me demande un mot de passe. Comment faire pour récupérer ce mot de passe dois je retourner sous visual studio.
Bonjour Jean-Luc,
le mot de passe par défaut est 123456789.
Il peut être modifié dans Visual Code : fichier LilyGO-T-Beam.ino à la ligne : const char *password = »123456789″;
Bonjour,
merci pour ce tuto.
Je dois tester en extérieur pour vérifier la récupération du positionnement satellites et l’envoi du signalement. La console série semble indiquer que cela fonctionne et je vois le réseau WIFI.
super
Tuto au top clair et précis.
Merci
@Jean Luc, à priori le mot de passe WIFI c’est celui de la ligne 48 du fichier Lilygo-T-BEAM.ino, mais je ne vois trop l’utilité de se connecter à ce réseau WIFI? si quelqu’un à des infos, merci de nous les communiquer.
Bonjour,
Merci pour le tuto !
J’ai vu dans le décret que la bande passante devait être de 20MHz, et qu’il faut se placer en mode « n » ou « g », donc éliminer le mode « b ».
Je n’ai pas trouvé dans le code une trace qui tiendrait compte de ces contraintes.
En sniffant une balise on remarque que la largeur de bande par défaut est 40 MHz et la trame est émise à 1Mps ce qui est un débit exclu dans les modes « n » et « g ».
Il y a certainement quelque chose qui m’échappe, mais qu’est-ce ?
Cordialement
Hello,
Merci beaucoup pour cette initiative, je développe déjà sur ESP8266 et ESP32 et faisant du drone c’est le projet idéal pour moi!
Petite question bête car je connais bien les ESP mais pas spécialement ce module TTGO (j’utilise surtout du M5Stack):
Je vois sur tes photos l’antenne qui est fixée mais sur ce module il y a une antenne pour le wifi et une pour le Lora et il me semble que la grosse antenne baton noire est celle du Lora, donc inutile pour ce projet ou je me trompe (ca serait l’inverse, la baton noire serait pour le wifi et l’autre pour le Lora?)
J’ai rapidement vu plus haut des questions sur les fréquences: ce module est vendu en différentes versions: 433/868/915MHz mais ces fréquences sont celles du module Lora non utilisé dans ce projet. Cette carte peut fonctionner en wifi et Lora en //
Donc si vous ne comptez pas utiliser le Lora vous pouvez prendre n’importe quelle version
Merci!
Bonjour et merci beaucoup pour ce petit tuto, ça fonctionne nickel !
Bon j’ai galéré un peu ca la version 2.3.0 de PlatformIO ne voulait pas s’installer, fonctionne parfaitement en 1.10.0 par contre.
Le SSID et la connexion wifi fonctionne, le « serial monitor » semble fonctionner normalement en affichant les coordonnées GPS, par contre je ne vois pas la diffusion de l’id électronique, est-ce normal ?
J’ai juste un petit doute sur la ligne 45 du fichier Lilygo-T etc .ino, comme je n’ai pas de numéro d’exploitant j’ai remis mon numéro UAS-FR-xxxxx (idem en SSID d’ailleurs), c’est bon ?
Merci,
Bonjour,
Merci pour ce tuto très bien fait, même si j’ai pas mal galéré pour réussir à compiler jusqu’à ce que je comprenne que bien que ma carte porte une référence de version 1.1 c’était bien T_BEAM_V10 qu’il fallait choisir dans board_def.h!
Autre point amusant: après bien du temps passé à essayer de comprendre pourquoi ma carte n’était pas reconnue lorsque je la connectai à mon PC Windows, j’ai eu l’idée pas si saugrenue que cela de prendre un autre cable usb …c’est ce que j’appelle revenir aux fondamentaux ;)) . Je mentionne ce point car sait-on jamais, un ou une autre pourrait rencontrer ce gag.
Une chose que je ne comprend pas c’est l’utilité du password car j’ai pu me connecter au réseau wifi de la carte sans indiquer de mot de passe… Si quelqu’un sait m’expliquer
Autre point, si quelqu’un connait une appli Android qui permet de vérifier que tout est OK au niveau de la balise lorsque l’on est sur le terrain cela serait…intéressant
En tout cas, merci encore pour ce tuto!
Bonjour,
Super votre tuto , j’ai réussi à faire fonctionner le TTGO-T-Beam pour mon drone (toujours en cours de fabrication, 1,8 Kg Pixhawk 4 et ArduPilot, enregistrement DGAC ok). J’ai également réalisé le sniffeur avec un ESP32 (TTGO-T-Display) qui récupère bien les trames.
J’ai soudé le petit afficheur Oled 0,96 pouces sur le TTGO-T-Beam, mais je n’ai pas réussi à modifier le code pour obtenir un affichage… Sans vouloir trop vous déranger, auriez-vous une piste ?
Merci